Find the Cartesian equation of the plane containing the points  and
and 
Find  and and    Find the cross product   This is the normal,  , to the plane. , to the plane.We know  is on the plane is on the plane Hence   Therefore the Cartesian equation of the plane is |
Find the Cartesian equation of the plane containing the points and
| Find and Find the cross product This is the normal, , to the plane.We know is on the plane Hence Therefore the Cartesian equation of the plane is |
Filed under Algebra, Cross Product, Vectors, Year 12 Specialist Mathematics
My Year 11 Specialist students have had an investigation which involves finding eigenvalues, eigenvectors and lines that are invariant under a particular linear transformation. This is not part of the course, but I feel for teachers who have to create new investigations every year.
Let’s find the eigenvalues and eigenvectors for matrix 
We want to find  such that
such that
(1) 
We solve 


Hence  and
and 
When  ,
, 
Hence, 
 and the eigenvector is
and the eigenvector is 
When  ,
, 
Hence, 
 and the eigenvector is
and the eigenvector is 
Which means the invariant lines are  and
and 

 line)
line)
At 1pm, object
travelling with constant velocity
km/h is sighted at the point with position vector
km. At 2pm object
travelling with constant velocity
km/h is sighted at the point with position vector
km. Determine the minimum distance between
OT Lee Mathematics Specialist Year 11 Unit 1 and 2 Exercise 10.1 Question 6.
(1) 
(2) 
 is the position vector of at 1pm.
is the position vector of at 1pm.
Find the relative displacement of to



Find the relative velocity of to

The relative displacement is perpendicular to the relative velocity at the closest approach.
That is
(3) 





Substitute  into the relative displacement and find the magnitude.
into the relative displacement and find the magnitude.



The closest objects and get to each other is  km at 1:27pm.
km at 1:27pm.
I have made an e-activity for this.
The vector projection (vector resolution or vector component) of  onto a non-zero vector
onto a non-zero vector  is splitting into two vectors, one is parallel to (the vector projection) and one perpendicular to
is splitting into two vectors, one is parallel to (the vector projection) and one perpendicular to
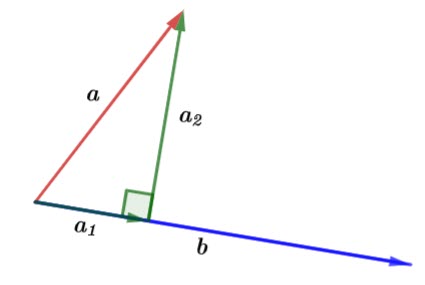
In the above diagram  is the vector projection of onto and
is the vector projection of onto and  is perpendicular to .
is perpendicular to .
How do we find and ?
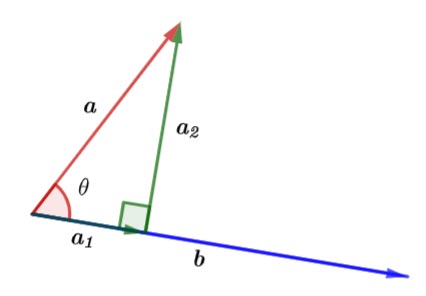
Using right trigonometry,

Remember the scalar product (dot product) of vectors is
(1) 
Hence 

and, 

This is the scalar projection of onto
To find the vector projection we need to multiply by  , that is find a vector with the same magnitude as in the direction of .
, that is find a vector with the same magnitude as in the direction of .
The vector projection is



Now for , we know 
Hence, 
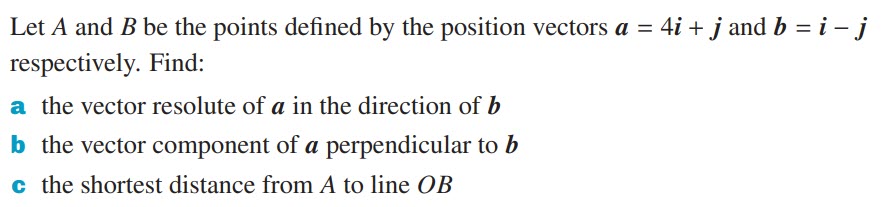
(a) 


(b)
(c)
The shortest distance (green vector) is the vector component of perpendicular to , i.e. 

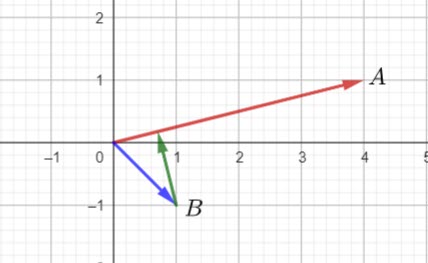
Points
are defined by the position vectors
and
.
Find a vector that bisects
.
If we think about how we add vectors using the parallelogram rule
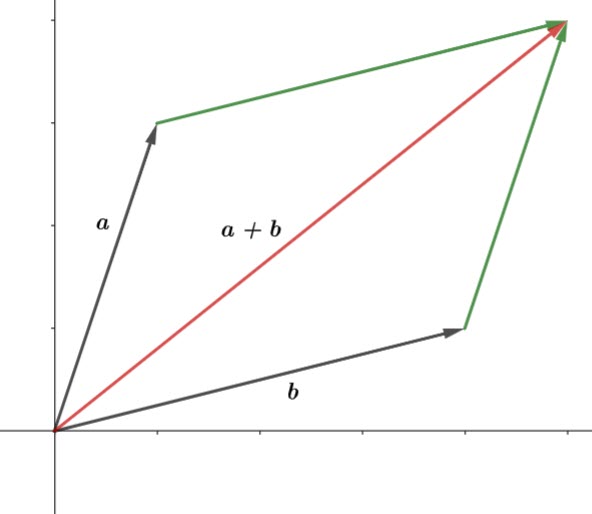
we can take advantage of the geometric properties of parallelograms (or of a rhombus).
If and are unit vectors, then the parallelogram is a rhombus, and the diagonal (i.e the resultant) bisects the angle.
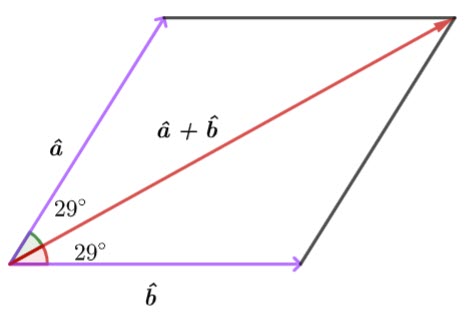
We need to find the sum of the unit vectors.




The vector that bisects is

Filed under Geometry, Vectors, Year 11 Specialist Mathematics
At 10am, object
travelling with constant velocity
km/h is sighted at the point with position vector
km. At 11am object
travelling with constant velocity
km/h is sighted at the point with position vector
km respectively. Use a scalar product method to determine
given that the two objects were closest together at a distance of
km at 4pm.
OT Lee Mathematics Specialist Year 11
At 4pm is at the point with position vector 
and is at the point with position vector 
We know the distance between and at 4pm is km.
Hence,



(1) 
In the diagram below, I have found the position vector of relative to  and the velocity of relative to
and the velocity of relative to 
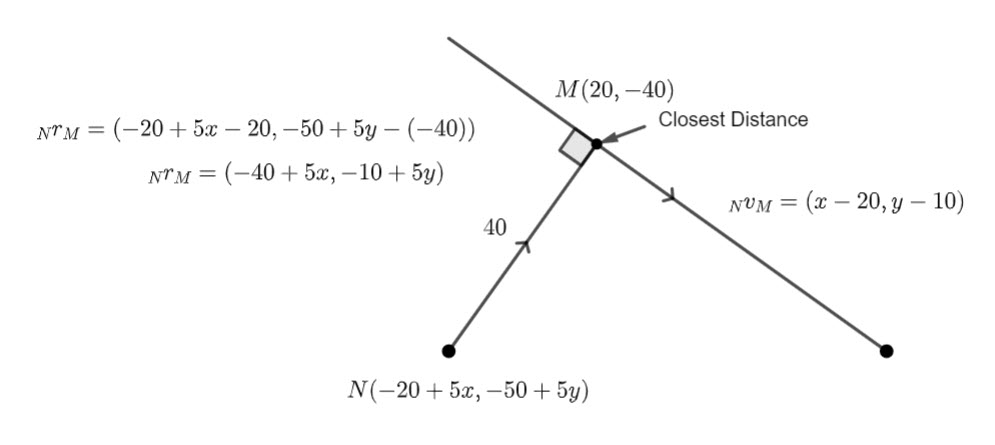
We know that when  and are the closest distance apart.
and are the closest distance apart.



(2) 
Two equations and two unknowns which we can solve simultaneously. Both equations are circles.
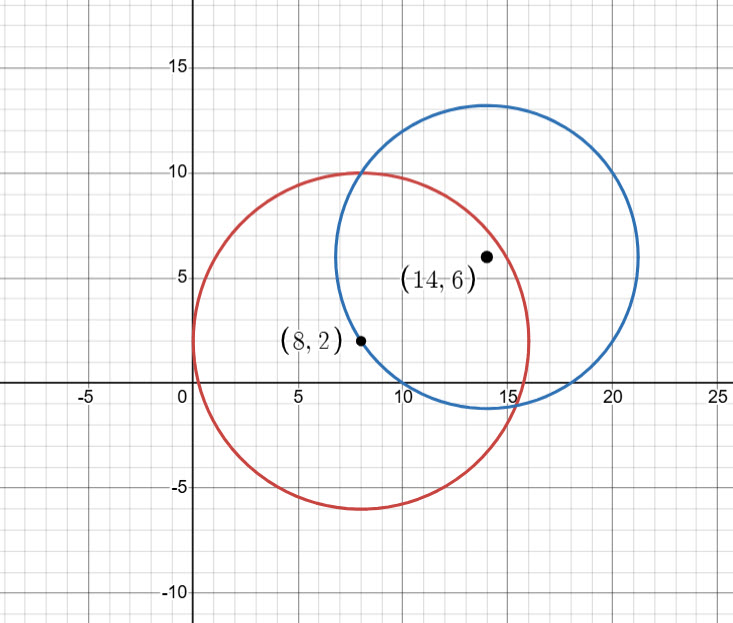
Equation  becomes
becomes
(3) 
and equation  becomes
becomes
(4) 
From equation 

We will worry about the negative version later.
Substitute for  into equation
into equation 






Square both sides of the equation







(5) 
Substitute  into
into 
(6) 
Substitute  into
into

(7) 
Now we need to consider the negative version of . If you work through (like I did above) you end with the same equation for  .
.
Hence our two values for are  or
or  .
.
Would someone be expected to do this in an exam? I hope not, but I think its worth doing.
Filed under Closest Approach, Vectors, Year 11 Specialist Mathematics

